| |
ICS 25.040.30 Leden 2002
|
|
Manipulační průmyslové roboty -Grafické uživatelské rozhraní |
ČSN 18 6504 |

Manipulating industrial robots - Graphical user interfaces for programming and operation of robots (GUI-R)
Robots manipulateurs industriels - Interfaces graphiques utilisateur pour la programmation et ľutilisation de robots (GUI-R)
Tato norma je českou verzí mezinárodní normy ISO 15187:2000. Mezinárodní norma ISO 15187:2000 má status české technické normy.
This standard is the Czech version of the International Standard ISO 15187:2000. The International Standard ISO 15187:2000 has the status of a Czech Standard.
|
© Český normalizační institut, 2002 63746 |
Národní předmluva
Citované normy
IEC 60416 zavedena jako ČSN IEC 416:1992 (34 5550) Všeobecná ustanovení pro tvorbu značek nahrazujících nápisy na předmětech (idt IEC 416:1988), nahrazena IEC 80416-1:2001
Vypracování normy
Zpracovatel: CHIBUSS Praha, IČO 14972301, Ing. Karel Čech
Pracovník Českého normalizačního institutu: Věra Krchňáková
|
MEZINÁRODNÍ NORMA ISO 15187 |
|
Manipulační průmyslové roboty - První vydání |
|
Grafické uživatelské rozhraní 2000-11-01 |
|
pro programování a ovládání robotů (GUI-R) |
ICS 25.040.30
Obsah
Strana
Předmluva......................................................................................................................................................................................... 4
Úvod................................................................................................................................................................................................... 5
1 Předmět normy.................................................................................................................................................................... 8
2 Normativní odkazy............................................................................................................................................................... 8
3 Termíny a definice............................................................................................................................................................... 9
4 Zásady návrhu.................................................................................................................................................................... 10
5 Prvky GUI-R......................................................................................................................................................................... 11
5.1 Pojetí programování a obecné prvky GUI-R................................................................................................................. 11
5.2 Obecné grafické prvky....................................................................................................................................................... 12
5.3 Dialogová okna pro roboty............................................................................................................................................... 15
5.4 Rozvržení obrazovky.......................................................................................................................................................... 17
6 Funkčnost a ikony.............................................................................................................................................................. 17
6.1 Pojetí funkčnosti................................................................................................................................................................ 17
6.2 Ikony..................................................................................................................................................................................... 19
Příloha A (informativní) Platformy GUI-R.................................................................................................................................. 26
Bibliografie...................................................................................................................................................................................... 28
Předmluva
ISO (Mezinárodní organizace pro normalizaci) je celosvětovou federací národních normalizačních orgánů (členů ISO). Mezinárodní normy obvykle připravují technické komise ISO. Každý člen ISO, který se zajímá o předmět, pro který byla vytvořena technická komise, má právo být v této technické komisi zastoupen. Práce se zúčastňují také vládní i nevládní mezinárodní organizace, s nimiž ISO navázala pracovní styk. ISO úzce spolupracuje s Mezinárodní elektrotechnickou komisí (IEC) ve všech záležitostech normalizace v elektrotechnice.
Mezinárodní normy se navrhují v souladu s pravidly uvedenými ve Směrnicích ISO/IEC, Část 3.
Návrhy mezinárodních norem přijaté technickými komisemi se rozesílají členům ISO k hlasování. Vydání mezinárodní normy vyžaduje souhlas alespoň 75 % hlasujících členů.
Upozorňuje se na možnost, že některé prvky této mezinárodní normy mohou být předmětem patentových práv. ISO nelze činit zodpovědnou za porušení některých nebo všech takových patentových práv.
Mezinárodní norma ISO 15187 byla vypracována technickou komisí ISO/TC 184 Systémy průmyslové automatizace a integrace, subkomisí SC 2 Roboty pro výrobní prostředí.
Příloha A této mezinárodní normy je pouze informativní.
Úvod
ISO 15187 je částí řady mezinárodních norem zabývajících se manipulačními průmyslovými roboty. Ostatní mezinárodní normy se zabývají takovými tématy, jako jsou bezpečnost, všeobecné vlastnosti, souřadnicové systémy, technické parametry a souvisící zkušební metody, terminologie a mechanické rozhraní (interface). Je známo, že tyto normy spolu vzájemně souvisí a souvisí rovněž s jinými mezinárodními normami.
Příloha A uvádí příklady možné platformy s GUI pro otevřenou architekturu.
Záměrem této mezinárodní normy je normalizovat použití grafických uživatelských rozhraní pro programování a ovládání robotu (nazývané GUI-R). Důležitými zákaznickými požadavky pro programováni a používání robotů jsou:
– zjednodušení a
– normalizované ovládání robotu.
Programování a používání průmyslových robotů vyžaduje soubor nástrojů, např. editor, překladač, ladicí program, které pomohou uživateli blíže určit různé, více nebo méně komplexní funkce, prováděné řídicí jednotkou robotu. U řídicích jednotek robotů, používaných po celém světě, jsou však mnohé funkce odlišné a norma pro GUI-R má zjednodušit jejich programování pomocí grafiky. GUI-R poskytuje v první řadě pokyny pro používání stylů (style guide) při tvorbě a používání grafických prvků pro programování robotů.
Proto norma GUI-R obsahuje pouze rozhraní pro uživatele k snadnému výběru prvků pro programování a ovládání. Funkce vyjádřené těmito prvky jsou obecně stanoveny, např. jako přímočarý pohyb robotu. Jednoznačná, kompletní a podrobná syntaxe a sémantika není cílem GUI-R, tj. všech parametrů pohybu, přesný význam pojmu „přímočarý“ pomocí lineární interpolace včetně funkce vyhlazování a další. Toto je určeno vlastním systémem řízení robotu a charakteristikami při programování. GUI-R není jazyk robotu vyjádřený grafickými prvky a ikonami. Uživatel si musí přečíst příručky k systému robotu a naučit se speciální funkce pro programování a řízení robotu. GUI-R pomáhá nalézt programové prvky a pracovat s grafickým rozvržením stejným způsobem na různých systémech robotů. Struktura programu může být zobrazena na obrazovce jako vývojový diagram.
Tato mezinárodní norma stanoví pouze podrobné specifikace úrovní GUI-R a jejich hierarchickou strukturu, viz obrázek 1. Obsahy nízké úrovně hierarchie nebudou, s ohledem na snadnější následnou implementaci, záměrně stanoveny.
Norma musí samozřejmě komplexně a přesně zpracovávat problematiku, která má být normalizována. Existuje ovšem mnoho různých programovacích jazyků robotů a jejich řízení s různým pojetím, funkcemi, syntaxí a sémantikou. Protože není možné zahrnout všechna (dílem neslučitelná) pojetí a funkce existujících (a budoucích) jazyků robotů pro vyjádření grafickými prvky, GUI-R pokrývá pouze hlavní prvky a funkce pro programování a ovládání robotů. Nespecifikuje všechny prvky na jediné funkční hladině, např. ikony pro všechny možné příkazy jazyka robotu, a nespecifikuje všechny parametry nebo prvky funkcí nebo příkazů, např. parametrů příkazu k pohybu. To znamená, že GUI-R se soustřeďuje na hlavní funkce (stanoveno horizontálně) a na hlavní syntaktické prvky nebo parametry (stanoveno vertikálně), viz obrázek 2.
Legenda
|
1 Vysoké úrovně |
6 Úroveň jazyka (implementace) |
|
2 Úroveň abstraktní |
7 C |
|
3 Nízké úrovně |
8 Vizuální jazyk |
|
4 Úroveň GUI |
9 Vývojový diagram |
|
5 Úroveň funkce |
10 Další (interpretační překladač apod.) |
Obrázek 1 - Zobrazení hierarchické struktury
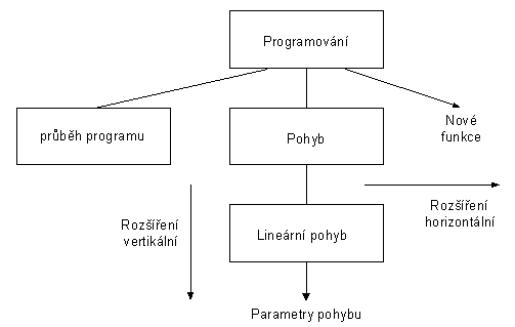
Obrázek 2 - Horizontální a vertikální rozšíření
Norma GUI-R nemůže zahrnovat všechny prvky specifického programovacího jazyka robotu a také musí umožnit použit GUI-R v budoucnosti pro nové funkce. Proto struktura GUI-R umožňuje přidání nových prvků a pravidel, a rovněž specifických prvků uživatele nebo dodavatele systému robotu. Uživatel nebo dodavatel může stanovit nové prvky vysoké funkční úrovně (rozšíření horizontální), jako např. nové příkazy nebo nové funkce, nebo mohou být přidány nové parametry (rozšíření vertikální), např. pro řízení pohybu. Zejména není úmyslem, aby GUI-R vyjadřovalo úplné funkční nebo jazykové definice.
Kdykoli je to možné, GUI-R obsahuje odkazy (a třeba i krátké vysvětlení v dodatku, to závisí na okolnostech) na normu nebo dokument de facto nahrazující normu, použitý pro jeho definiční základ. Cílem vypracování GUI-R je jeho použití pro aplikace robotů a nikoli jeho obecné použití v dalších oblastech, např. grafice. Bylo rozhodnuto vypracovat pravidla, která jsou realistická a mohou být uplatněna v praktických aplikacích v průmyslové výrobě. To někdy vede k aktivnímu rozvíjení specifikací normy GUI-R a v jiných případech, k odkazování na další normy. První případ byl použit pouze tehdy, když to bylo velmi zapotřebí.
Rozhraní GUI-R stanoví, jak umisťovat ikony, jak na obrazovce strukturovat různé oblasti pro uživatelské programování a vstupy, a udává pravidla pro návrh ikon. To ale nemohou být „přesné“ definice: například není stanoveno, že plocha pro ikony příkazů jazyka musí být umístěna na obrazovce v souřadnicích od (22,34) do (345,57), nebo že pro pozadí ikony musí být použita pouze modrá barva. Rozsah této mezinárodní normy je však stanoven pragmatickým způsobem, např. pravidly pro ikonu pohybu. Existují technická doporučení pro prvky GUI-R nebo pro uspořádání obrazovky, která mají pomáhat uživateli aplikovat normu, ale nemají jej příliš omezovat. Rozhraní GUI-R bylo navrženo takovým způsobem, že je možné transformovat grafické prvky do jazykového vyjádření robotu a naopak.
1 Předmět normy
Tato mezinárodní norma stanovuje strukturu a prvky grafického uživatelského rozhraní pro programování a ovládání robotů (GUI-R). Na obrázku 3 jsou znázorněny vztahy k systému robotu, programovacímu a simulačnímu systému a k editoru programu.
Důležité je, že grafický programovací systém může být používán v obou režimech, tj. off-line, kdy zpracování probíhá pomocí odděleného programovacího terminálu, a nebo on-line, kdy zpracování probíhá při propojení se systémem robotu. Stejný druh grafického uživatelského rozhraní pro systémy off-line je tedy možné použít ve spojení se všemi existujícími roboty a všemi existujícími textovými jazyky. Vytvořený kód je možné uložit na disk nebo jiné médium, umožňující jeho následné načtení do systému robotu, a nebo je možné ho zavést přímo, např. pomocí sériového připojení. On-line systém je možné propojit se systémem robotu pomocí sériového připojení s vysokou přenosovou rychlostí nebo je možné úplně ho zabudovat do systému řízení robotu.
Obsah této mezinárodní normy je zaměřen na GUI-R pro programování. Samotný program robotu, a také jeho vyjádření, nejsou předmětem této mezinárodní normy.
Rozhraní GUI-R pro ovládání robotu bude zapracováno do budoucího vydání této mezinárodní normy.
-- Vynechaný text --